سیستم مانیتور 360 درجه در اطراف (360 سیستم AVM)
راننده همیشه با این مشکلات روبرو می شود: هنگام رانندگی در یک مسیر باریک، تخمین زدن محدوده امن برای عبور از آن دشوار است.دامنه دید از آینه های خودرو بسیار محدود است.، حتی خودرو با دوربین نمای عقب ساخته شده، هنوز نقطه کور با تصویر نمای عقب وجود دارد؛ هنگام عقب، برخی از موانع کوچک و پایین را از طریق آینه نمای عقب دشوار است،یا توسط رادار خودرو شناسایی می شود.....

سیستم 360 درجه در اطراف سیستم 360 AVM به حل این مشکلات کمک می کند. از طریق سیستم 360 AVM، راننده می تواند وضعیت اطراف خودرو را در 360 درجه مشاهده کند.تا از تصادف اجتناب کنیم.
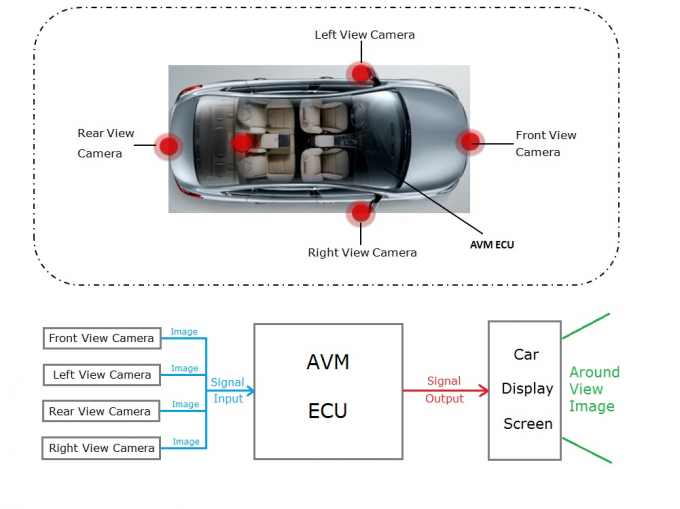
سیستم مانیتور 360 درجه در اطراف ((360 سیستم AVM) شامل یک واحد کنترل الکترونیکی ((ECU) و چهار دوربین است. ECU تصاویری را که توسط چهار دستگاه ضبط شده را پردازش می کند.دوربین ها و بعدش به صفحه نمایش ماشین برسیم.
عملکرد اساسی سیستم 360 AVM
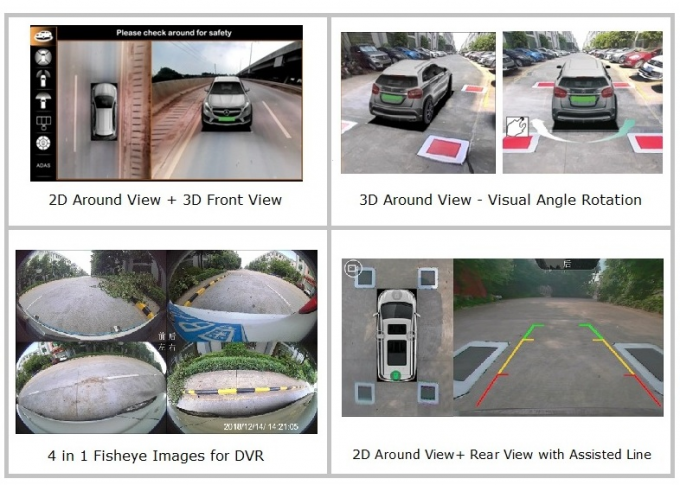
مندید دو بعدی در اطراف (Range: جلو و عقب)>3 متر,چپ و راست>2 متر,جفت گیری بدون درهم)
مندید سه بعدی
من4 در 1 تصاویر Fisheye برای DVR
منخط پشتیبانی ایستاتیک یا خط پشتیبانی پویا برای پارکینگ
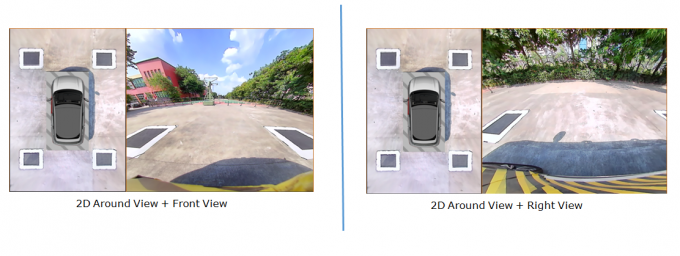
2) نمایش تصویر جهت مختلف
سیستم می تواند تصاویر را از جهت های مختلف نشان دهد.
3) نمایشگر 3D در اطراف
مننمایش 3D در اطراف دید جلو، عقب، چپ و راست.
مننمایش شیفت ها با توجه به تغییر دنده، تغییر سرعت، عملکرد راننده، سیگنال های چرخش و غیره
منمنظره می تواند در 360 چرخش°دور ماشين
منمدل ماشین در ویدئو با توجه به رانندگی واقعی تغییر جهت خواهد کرد.

4) تغییر دیدگاه
سیستم با توجه به سیگنال های چرخش، تغییر دنده یا دکمه AVM در مرکز کنترل ماشین، دیدگاه های متفاوتی را تغییر می دهد.
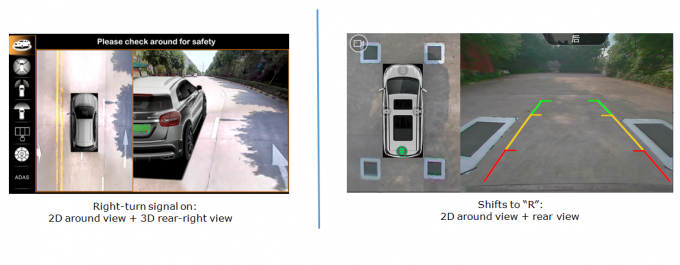
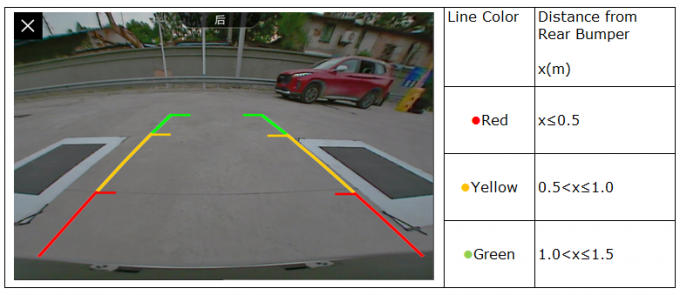
5) خط پشتیبانی ایستاتیک یا خط پشتیبانی پویا برای پارک
وقتی راننده دنده را به "R" تغییر می دهد، سیستم دو بعدی را در اطراف و عقب نمایش می دهد.خط پشتیبانی ایستاتیک یا خط پشتیبانی پویا برای کمک به راننده برای پارک کردن یا عقب نشینی نشان داده می شود..
علاوه بر عملکرد اصلی، سیستم 360 AVM می تواند به موارد بیشتری نیز اجرا شود.ADASکمک های رانندگیاز جمله:
1) چشم انداز زمین کامل زیر ماشین (پاتنت های انحصاری کاندیتک)
این تابع می تواند زمین کامل را نشان دهد تا به راننده کمک کند تا از حفره ها و سنگ های بزرگ در هنگام رانندگی در جاده جلوتر برود.

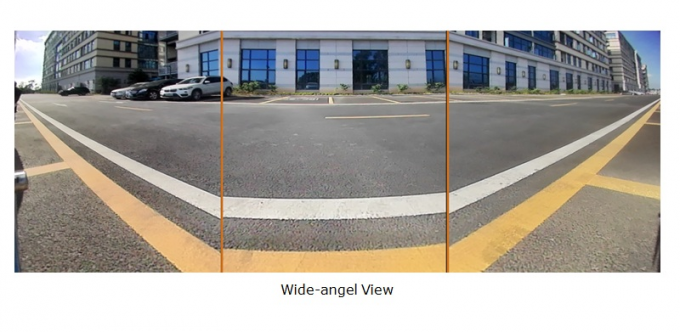
2) چشم انداز زاویه بزرگ
سیستم می تواند نمای زاویه بزرگ را در tعکس بازپخش، منظره افق بسته شده تا200°.
3) اخطار از فاصله رادار فوق صوتی
سیستم AVM شامل رادار نیست، خودرو بایدبا رادار شوخي کرد یا بعد از آن می توانیم رادار را بر اساس خواسته مشتری بارگیری کنیم.



4) عملکرد DVR
سیستم AVM می تواند ویدئوها را از چهار دوربین ذخیره و به یک تصویر 4 در 1 برای عملکرد DVR تولید کند.
کارت ذخیره سازی پشتیبانی شده: کارت TF، فرمت FAT32، حداکثر 32GB.

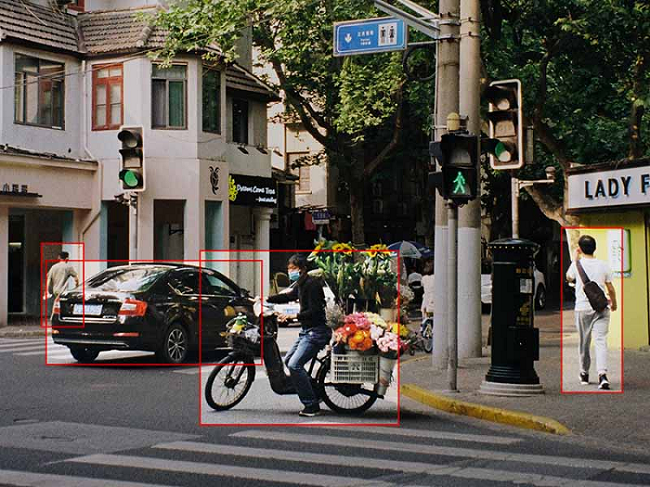
تشخیص اجسام متحرک (MOD)
در هنگام پارک یا راه اندازی ماشین، از طریق iتکنولوژی تشخیص جادوگر,در۳۶۰ Sسیستم VM می تونهتشخیص در حال حرکت در اطراف ماشین و هشدار به راننده برای تنظیمرفتار رانندگی.
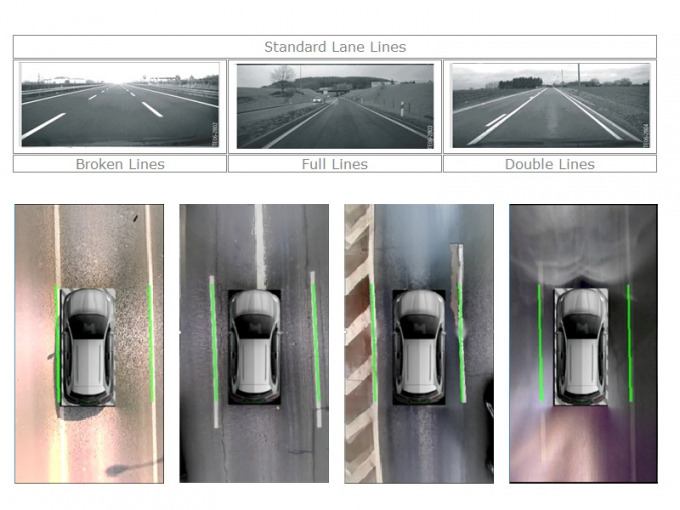
راهDباز کردنWآرینینگSیستم(LDWS)
زمانی که سرعت وسیله نقلیه بیش از ۵۰ کیلومتر در ساعت باشد ((سرعتقابل تنظیم) ، سیستم AVM خط خط استاندارد را بر اساس دید دو بعدی خود شناسایی می کند.
اگه رانندهانحرافلاز مسير اصلي بیهوشly ((بدون استفاده از سیگنال چرخش), سیستمميتونه هشدار بدهدر0.5 ثانیه قبل از شروع مسیر برای یادآوری رانندهبرای خروج از خطوضعیت خودرو، زمان واکنش بیشتری را برای راننده فراهم می کند، برخورد ناشی از انحراف از خط را به شدت کاهش می دهد.
نظرات: تمام توابع فوق می توانند به طور آزاد انتخاب شوند، توابع سیستم از سفارشی سازی پشتیبانی می کنند.

 پیام شما باید بین 20 تا 3000 کاراکتر باشد!
پیام شما باید بین 20 تا 3000 کاراکتر باشد!